Built-in HTTP server is a basic HTTP/1.0 server that supports 'keep-alive' extension. Persistent connections are limited to 512 requests per connection and allow no more then 5 seconds between requests.
General options
All OSRM HTTP requests use a common structure.
The following syntax applies to all services, except as noted.
Requests
| Parameter | Description |
|---|---|
service |
One of the following values:
route
,
nearest
,
table
,
match
,
trip
,
tile |
version |
Version of the protocol implemented by the service.
v1
for all OSRM 5.x installations |
profile |
Mode of transportation, is determined statically by the Lua profile that is used to prepare the data using
osrm-extract
. Typically
car
,
bike
or
foot
if using one of the supplied profiles. |
coordinates |
String of format
{longitude},{latitude};{longitude},{latitude}[;{longitude},{latitude} ...]
or
polyline({polyline}) or polyline6({polyline6})
. |
format |
json
or
flatbuffers
. This parameter is optional and defaults to
json
. |
Passing any option=value is optional. polyline follows Google's polyline format with precision 5 by default and can be generated using this package.
To pass parameters to each location some options support an array like encoding:
Request options
| Option | Values | Description |
|---|---|---|
| bearings | {bearing};{bearing}[;{bearing} ...] |
Limits the search to segments with given bearing in degrees towards true north in clockwise direction. |
| radiuses | {radius};{radius}[;{radius} ...] |
Limits the search to given radius in meters. |
| generate _ hints | true
(default),
false |
Adds a Hint to the response which can be used in subsequent requests, see
hints
parameter. |
| hints | {hint};{hint}[;{hint} ...] |
Hint from previous request to derive position in street network. |
| approaches | {approach};{approach}[;{approach} ...] |
Keep waypoints on curb side. |
| exclude | {class}[,{class}] |
Additive list of classes to avoid, order does not matter. |
| snapping | default
(default),
any |
Default snapping avoids is_startpoint (see profile) edges,
any
will snap to any edge in the graph |
| skip_waypoints | true
,
false
(default) |
Removes waypoints from the response. Waypoints are still calculated, but not serialized. Could be useful in case you are interested in some other part of response and do not want to transfer waste data. |
Where the elements follow the following format:
| Element | Values |
|---|---|
| bearing | {value},{range}
integer 0 .. 360,integer 0 .. 180 |
| radius | double >= 0
or
unlimited
(default) |
| hint | Base64
string |
| approach | curb
or
unrestricted
(default) |
| class | A class name determined by the profile or
none
. |
{option}={element};{element}[;{element} ... ]
The number of elements must match exactly the number of locations (except for generate_hints and exclude). If you don't want to pass a value but instead use the default you can pass an empty element.
Example: 2nd location use the default value for option:
{option}={element};;{element}
Example Requests
# Query on Berlin with three coordinates:
curl 'http://router.project-osrm.org/route/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219?overview=false'
# Query on Berlin excluding the usage of motorways:
curl 'http://router.project-osrm.org/route/v1/driving/13.388860,52.517037;13.397634,52.529407?exclude=motorway'
# Using polyline:
curl 'http://router.project-osrm.org/route/v1/driving/polyline(ofp_Ik_vpAilAyu@te@g`E)?overview=false'
Responses
Every response object has a code property containing one of the strings below or a service dependent code:
| Type | Description |
|---|---|
Ok |
Request could be processed as expected. |
InvalidUrl |
URL string is invalid. |
InvalidService |
Service name is invalid. |
InvalidVersion |
Version is not found. |
InvalidOptions |
Options are invalid. |
InvalidQuery |
The query string is synctactically malformed. |
InvalidValue |
The successfully parsed query parameters are invalid. |
NoSegment |
One of the supplied input coordinates could not snap to street segment. |
TooBig |
The request size violates one of the service specific request size restrictions. |
messageis a optional human-readable error message. All other status types are service dependent.- In case of an error the HTTP status code will be
400. Otherwise the HTTP status code will be200andcodewill beOk.
Every response object has a data_version propetry containing timestamp from the original OpenStreetMap file. This field is optional. It can be ommited if data_version parametr was not set on osrm-extract stage or OSM file has not osmosis_replication_timestamp section.
Code
Data version
Example response
{
"code": "Ok",
"message": "Everything worked",
"data_version": "2017-11-17T21:43:02Z"
}
Services
Nearest service
Snaps a coordinate to the street network and returns the nearest n matches.
Where coordinates only supports a single {longitude},{latitude} entry.
In addition to the general options the following options are supported for this service:
| Option | Values | Description |
|---|---|---|
| number | integer >= 1
(default
1
) |
Number of nearest segments that should be returned. |
As waypoints is a single thing, returned byt that service, using it with option skip_waypoints set to true is quite useless, but still
possible. In that case only code field will be returned.
Response
codeif the request was successfulOkotherwise see the service dependent and general status codes.-
waypointsarray ofWaypointobjects sorted by distance to the input coordinate. Each object has at least the following additional properties:nodes: Array of OpenStreetMap node ids.
Example Requests
# Querying nearest three snapped locations of `13.388860,52.517037` with a bearing between `20° - 340°`.
curl 'http://router.project-osrm.org/nearest/v1/driving/13.388860,52.517037?number=3&bearings=0,20'
Example Response
{
"waypoints" : [
{
"nodes": [
2264199819,
0
],
"hint" : "KSoKADRYroqUBAEAEAAAABkAAAAGAAAAAAAAABhnCQCLtwAA_0vMAKlYIQM8TMwArVghAwEAAQH1a66g",
"distance" : 4.152629,
"name" : "Friedrichstraße",
"location" : [
13.388799,
52.517033
]
},
{
"nodes": [
2045820592,
0
],
"hint" : "KSoKADRYroqUBAEABgAAAAAAAAAAAAAAKQAAABhnCQCLtwAA7kvMAAxZIQM8TMwArVghAwAAAQH1a66g",
"distance" : 11.811961,
"name" : "Friedrichstraße",
"location" : [
13.388782,
52.517132
]
},
{
"nodes": [
0,
21487242
],
"hint" : "KioKgDbbDgCUBAEAAAAAABoAAAAAAAAAPAAAABlnCQCLtwAA50vMADJZIQM8TMwArVghAwAAAQH1a66g",
"distance" : 15.872438,
"name" : "Friedrichstraße",
"location" : [
13.388775,
52.51717
],
}
],
"code" : "Ok"
}
Route service
Finds the fastest route between coordinates in the supplied order.
In addition to the general options the following options are supported for this service:
| Option | Values | Description |
|---|---|---|
| alternatives | true
,
false
(default), or Number |
Search for alternative routes. Passing a number
alternatives=n
searches for up to
n
alternative routes.
* |
| steps | true
,
false
(default) |
Returned route steps for each route leg |
| annotations | true
,
false
(default),
nodes
,
distance
,
duration
,
datasources
,
weight
,
speed |
Returns additional metadata for each coordinate along the route geometry. |
| geometries | polyline
(default),
polyline6
,
geojson |
Returned route geometry format (influences overview and per step) |
| overview | simplified
(default),
full
,
false |
Add overview geometry either full, simplified according to highest zoom level it could be display on, or not at all. |
| continue _ straight | default
(default),
true
,
false |
Forces the route to keep going straight at waypoints constraining uturns there even if it would be faster. Default value depends on the profile. |
| waypoints | {index};{index};{index}... |
Treats input coordinates indicated by given indices as waypoints in returned Match object. Default is to treat all input coordinates as waypoints. |
* Please note that even if alternative routes are requested, a result cannot be guaranteed.
Response
codeif the request was successfulOkotherwise see the service dependent and general status codes.waypoints: Array ofWaypointobjects representing all waypoints in order:routes: An array ofRouteobjects, ordered by descending recommendation rank.
In case of error the following codes are supported in addition to the general ones:
| Type | Description |
|---|---|
NoRoute |
No route found. |
All other properties might be undefined.
Example Request
# Query on Berlin with three coordinates and no overview geometry returned:
curl 'http://router.project-osrm.org/route/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219?overview=false'
Table service
Computes the duration of the fastest route between all pairs of supplied coordinates. Returns the durations or distances or both between the coordinate pairs. Note that the distances are not the shortest distance between two coordinates, but rather the distances of the fastest routes. Duration is in seconds and distances is in meters.
Options
In addition to the general options the following options are supported for this service:
| Option | Values | Description |
|---|---|---|
| sources | {index};{index}[;{index} ...]
or
all
(default) |
Use location with given index as source. |
| destinations | {index};{index}[;{index} ...]
or
all
(default) |
Use location with given index as destination. |
| annotations | duration
(default),
distance
, or
duration,distance |
Return the requested table or tables in response. |
| fallback_speed | double > 0 |
If no route found between a source/destination pair, calculate the as-the-crow-flies distance, then use this speed to estimate duration. |
| fallback_coordinate | input
(default), or
snapped |
When using a
fallback_speed
, use the user-supplied coordinate (
input
), or the snapped location (
snapped
) for calculating distances. |
| scale_factor | double > 0 |
Use in conjunction with
annotations=durations
. Scales the table
duration
values by this number. |
Unlike other array encoded options, the length of sources and destinations can be smaller or equal
to number of input locations;
With skip_waypoints set to true, both sources and destinations arrays will be skipped.
Example:
sources=0;5;7&destinations=5;1;4;2;3;6
| Element | Values |
|---|---|
| index | 0 <= integer < #locations |
Response
codeif the request was successfulOkotherwise see the service dependent and general status codes.durationsarray of arrays that stores the matrix in row-major order.durations[i][j]gives the travel time from the i-th source to the j-th destination. Values are given in seconds. Can benullif no route betweeniandjcan be found.distancesarray of arrays that stores the matrix in row-major order.distances[i][j]gives the travel distance from the i-th source to the j-th destination. Values are given in meters. Can benullif no route betweeniandjcan be found.sourcesarray ofWaypointobjects describing all sources in orderdestinationsarray ofWaypointobjects describing all destinations in orderfallback_speed_cells(optional) array of arrays containingi,jpairs indicating which cells contain estimated values based onfallback_speed. Will be absent iffallback_speedis not used.
In case of error the following codes are supported in addition to the general ones:
| Type | Description |
|---|---|
NoTable |
No route found. |
NotImplemented |
This request is not supported |
All other properties might be undefined.
Example Request
# Returns a 3x3 duration matrix:
curl 'http://router.project-osrm.org/table/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219'
# Returns a 1x3 duration matrix
curl 'http://router.project-osrm.org/table/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219?sources=0'
# Returns a asymmetric 3x2 duration matrix with from the polyline encoded locations `qikdcB}~dpXkkHz`:
curl 'http://router.project-osrm.org/table/v1/driving/polyline(egs_Iq_aqAppHzbHulFzeMe`EuvKpnCglA)?sources=0;1;3&destinations=2;4'
# Returns a 3x3 duration matrix:
curl 'http://router.project-osrm.org/table/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219?annotations=duration'
# Returns a 3x3 distance matrix for CH:
curl 'http://router.project-osrm.org/table/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219?annotations=distance'
# Returns a 3x3 duration matrix and a 3x3 distance matrix for CH:
curl 'http://router.project-osrm.org/table/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219?annotations=distance,duration'
Example Response
{
"sources": [
{
"location": [
13.3888,
52.517033
],
"hint": "PAMAgEVJAoAUAAAAIAAAAAcAAAAAAAAArss0Qa7LNEHiVIRA4lSEQAoAAAAQAAAABAAAAAAAAADMAAAAAEzMAKlYIQM8TMwArVghAwEA3wps52D3",
"name": "Friedrichstraße"
},
{
"location": [
13.397631,
52.529432
],
"hint": "WIQBgL6mAoAEAAAABgAAAAAAAAA7AAAAhU6PQHvHj0IAAAAAQbyYQgQAAAAGAAAAAAAAADsAAADMAAAAf27MABiJIQOCbswA_4ghAwAAXwVs52D3",
"name": "Torstraße"
},
{
"location": [
13.428554,
52.523239
],
"hint": "7UcAgP___38fAAAAUQAAACYAAABTAAAAhSQKQrXq5kKRbiZCWJo_Qx8AAABRAAAAJgAAAFMAAADMAAAASufMAOdwIQNL58wA03AhAwMAvxBs52D3",
"name": "Platz der Vereinten Nationen"
}
],
"durations": [
[
0,
192.6,
382.8
],
[
199,
0,
283.9
],
[
344.7,
222.3,
0
]
],
"destinations": [
{
"location": [
13.3888,
52.517033
],
"hint": "PAMAgEVJAoAUAAAAIAAAAAcAAAAAAAAArss0Qa7LNEHiVIRA4lSEQAoAAAAQAAAABAAAAAAAAADMAAAAAEzMAKlYIQM8TMwArVghAwEA3wps52D3",
"name": "Friedrichstraße"
},
{
"location": [
13.397631,
52.529432
],
"hint": "WIQBgL6mAoAEAAAABgAAAAAAAAA7AAAAhU6PQHvHj0IAAAAAQbyYQgQAAAAGAAAAAAAAADsAAADMAAAAf27MABiJIQOCbswA_4ghAwAAXwVs52D3",
"name": "Torstraße"
},
{
"location": [
13.428554,
52.523239
],
"hint": "7UcAgP___38fAAAAUQAAACYAAABTAAAAhSQKQrXq5kKRbiZCWJo_Qx8AAABRAAAAJgAAAFMAAADMAAAASufMAOdwIQNL58wA03AhAwMAvxBs52D3",
"name": "Platz der Vereinten Nationen"
}
],
"code": "Ok",
"distances": [
[
0,
1886.89,
3791.3
],
[
1824,
0,
2838.09
],
[
3275.36,
2361.73,
0
]
],
"fallback_speed_cells": [
[ 0, 1 ],
[ 1, 0 ]
]
}
Match service
Map matching matches/snaps given GPS points to the road network in the most plausible way. Please note the request might result multiple sub-traces. Large jumps in the timestamps (> 60s) or improbable transitions lead to trace splits if a complete matching could not be found. The algorithm might not be able to match all points. Outliers are removed if they can not be matched successfully.
In addition to the general options the following options are supported for this service:
| Option | Values | Description |
|---|---|---|
| steps | true
,
false
(default) |
Returned route steps for each route |
| geometries | polyline
(default),
polyline6
,
geojson |
Returned route geometry format (influences overview and per step) |
| annotations | true
,
false
(default),
nodes
,
distance
,
duration
,
datasources
,
weight
,
speed |
Returns additional metadata for each coordinate along the route geometry. |
| overview | simplified
(default),
full
,
false |
Add overview geometry either full, simplified according to highest zoom level it could be display on, or not at all. |
| timestamps | {timestamp};{timestamp}[;{timestamp} ...] |
Timestamps for the input locations in seconds since UNIX epoch. Timestamps need to be monotonically increasing. |
| radiuses | {radius};{radius}[;{radius} ...] |
Standard deviation of GPS precision used for map matching. If applicable use GPS accuracy. |
| gaps | split
(default),
ignore |
Allows the input track splitting based on huge timestamp gaps between points. |
| tidy | true
,
false
(default) |
Allows the input track modification to obtain better matching quality for noisy tracks. |
| waypoints | {index};{index};{index}... |
Treats input coordinates indicated by given indices as waypoints in returned Match object. Default is to treat all input coordinates as waypoints. |
| Parameter | Values |
|---|---|
| timestamp | integer
seconds since UNIX epoch |
| radius | double >= 0
(default 5m) |
The radius for each point should be the standard error of the location measured in meters from the true location.
Use Location.getAccuracy() on Android or CLLocation.horizontalAccuracy on iOS.
This value is used to determine which points should be considered as candidates (larger radius means more candidates) and how likely each candidate is (larger radius means far-away candidates are penalized less).
The area to search is chosen such that the correct candidate should be considered 99.9% of the time (for more details see this ticket).
Response
codeif the request was successfulOkotherwise see the service dependent and general status codes.-
tracepoints: Array ofWaypointobjects representing all points of the trace in order. If the trace point was ommited by map matching because it is an outlier, the entry will benull. EachWaypointobject has the following additional properties:matchings_index: Index to theRouteobject inmatchingsthe sub-trace was matched to.waypoint_index: Index of the waypoint inside the matched route.alternatives_count: Number of probable alternative matchings for this trace point. A value of zero indicate that this point was matched unambiguously. Split the trace at these points for incremental map matching.
-
matchings: An array ofRouteobjects that assemble the trace. EachRouteobject has the following additional properties:confidence: Confidence of the matching.floatvalue between 0 and 1. 1 is very confident that the matching is correct.
In case of error the following codes are supported in addition to the general ones:
| Type | Description |
|---|---|
NoMatch |
No matchings found. |
All other properties might be undefined.
Trip service
The trip plugin solves the Traveling Salesman Problem using a greedy heuristic (farthest-insertion algorithm) for 10 or more waypoints and uses brute force for less than 10 waypoints. The returned path does not have to be the fastest path. As TSP is NP-hard it only returns an approximation. Note that all input coordinates have to be connected for the trip service to work.
In addition to the general options the following options are supported for this service:
| Option | Values | Description |
|---|---|---|
| roundtrip | true
(default),
false |
Returned route is a roundtrip (route returns to first location) |
| source | any
(default),
first |
Returned route starts at
any
or
first
coordinate |
| destination | any
(default),
last |
Returned route ends at
any
or
last
coordinate |
| steps | true
,
false
(default) |
Returned route instructions for each trip |
| annotations | true
,
false
(default),
nodes
,
distance
,
duration
,
datasources
,
weight
,
speed |
Returns additional metadata for each coordinate along the route geometry. |
| geometries | polyline
(default),
polyline6
,
geojson |
Returned route geometry format (influences overview and per step) |
| overview | simplified
(default),
full
,
false |
Add overview geometry either full, simplified according to highest zoom level it could be display on, or not at all. |
Fixing Start and End Points
It is possible to explicitely set the start or end coordinate of the trip.
When source is set to first, the first coordinate is used as start coordinate of the trip in the output. When destination is set to last, the last coordinate will be used as destination of the trip in the returned output. If you specify any, any of the coordinates can be used as the first or last coordinate in the output.
However, if source=any&destination=any the returned round-trip will still start at the first input coordinate by default.
Currently, not all combinations of roundtrip, source and destination are supported.
Right now, the following combinations are possible:
| roundtrip | source | destination | supported |
|---|---|---|---|
| true | first | last | yes |
| true | first | any | yes |
| true | any | last | yes |
| true | any | any | yes |
| false | first | last | yes |
| false | first | any | no |
| false | any | last | no |
| false | any | any | no |
code: if the request was successfulOkotherwise see the service dependent and general status codes.-
waypoints: Array ofWaypointobjects representing all waypoints in input order. EachWaypointobject has the following additional properties:trips_index: Index totripsof the sub-trip the point was matched to.waypoint_index: Index of the point in the trip.
trips: An array ofRouteobjects that assemble the trace.
In case of error the following codes are supported in addition to the general ones:
| Type | Description |
|---|---|
NoTrips |
No trips found because input coordinates are not connected. |
NotImplemented |
This request is not supported |
All other properties might be undefined.
Example Requests
# Round trip in Berlin with three stops:
curl 'http://router.project-osrm.org/trip/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219'
# Round trip in Berlin with four stops, starting at the first stop, ending at the last:
curl 'http://router.project-osrm.org/trip/v1/driving/13.388860,52.517037;13.397634,52.529407;13.428555,52.523219;13.418555,52.523215?source=first&destination=last'
Response
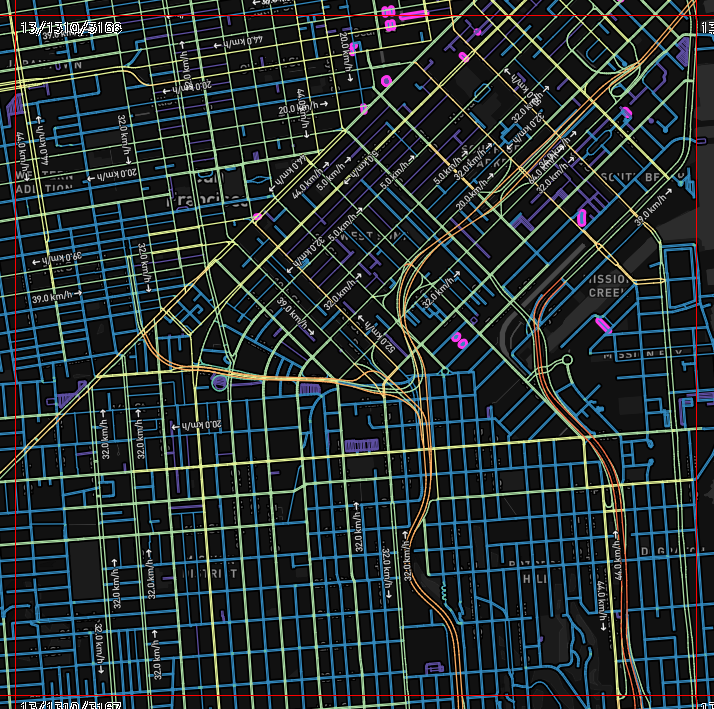
Tile service
This service generates Mapbox Vector Tiles that can be viewed with a vector-tile capable slippy-map viewer. The tiles contain road geometries and metadata that can be used to examine the routing graph. The tiles are generated directly from the data in-memory, so are in sync with actual routing results, and let you examine which roads are actually routable, and what weights they have applied.
The x, y, and zoom values are the same as described at https://wiki.openstreetmap.org/wiki/Slippy_map_tilenames, and are supported by vector tile viewers like Mapbox GL JS.
The response object is either a binary encoded blob with a Content-Type of application/x-protobuf, or a 404 error. Note that OSRM is hard-coded to only return tiles from zoom level 12 and higher (to avoid accidentally returning extremely large vector tiles).
Vector tiles contain two layers:
speeds layer:
| Property | Type | Description |
|---|---|---|
speed |
integer |
the speed on that road segment, in km/h |
is_small |
boolean |
whether this segment belongs to a small (< 1000 node) strongly connected component |
datasource |
string |
the source for the speed value (normally
lua profile
unless you're using the
traffic update feature
, in which case it contains the stem of the filename that supplied the speed value for this segment |
duration |
float |
how long this segment takes to traverse, in seconds. This value is to calculate the total route ETA. |
weight |
integer |
how long this segment takes to traverse, in units (may differ from
duration
when artificial biasing is applied in the Lua profiles). ACTUAL ROUTING USES THIS VALUE. |
name |
string |
the name of the road this segment belongs to |
rate |
float |
the value of
length/weight
- analagous to
speed
, but using the
weight
value rather than
duration
, rounded to the nearest integer |
is_startpoint |
boolean |
whether this segment can be used as a start/endpoint for routes |
turns layer:
| Property | Type | Description |
|---|---|---|
bearing_in |
integer |
the absolute bearing that approaches the intersection. -180 to +180, 0 = North, 90 = East |
turn_angle |
integer |
the angle of the turn, relative to the
bearing_in
. -180 to +180, 0 = straight ahead, 90 = 90-degrees to the right |
cost |
float |
the time we think it takes to make that turn, in seconds. May be negative, depending on how the data model is constructed (some turns get a "bonus"). |
weight |
float |
the weight we think it takes to make that turn. May be negative, depending on how the data model is constructed (some turns get a "bonus"). ACTUAL ROUTING USES THIS VALUE |
type |
string |
the type of this turn - values like
turn
,
continue
, etc. See the
StepManeuver
for a partial list, this field also exposes internal turn types that are never returned with an API response |
modifier |
string |
the direction modifier of the turn (
left
,
sharp left
, etc) |
Example request
# This fetches a Z=13 tile for downtown San Francisco:
curl 'http://router.project-osrm.org/tile/v1/car/tile(1310,3166,13).mvt'
Example response
Result objects
Route object
Represents a route through (potentially multiple) waypoints.
Properties
distance: The distance traveled by the route, infloatmeters.duration: The estimated travel time, infloatnumber of seconds.geometry: The whole geometry of the route value depending onoverviewparameter, format depending on thegeometriesparameter. SeeRouteStep'sgeometryproperty for a parameter documentation.weight: The calculated weight of the route.weight_name: The name of the weight profile used during extraction phase.
| overview | Description |
|---|---|
| simplified | Geometry is simplified according to the highest zoom level it can still be displayed on full. |
| full | Geometry is not simplified. |
| false | Geometry is not added. |
legs: The legs between the given waypoints, an array ofRouteLegobjects.
Three input coordinates, geometry=geojson, steps=false:
Example
{
"distance": 90.0,
"duration": 300.0,
"weight": 300.0,
"weight_name": "duration",
"geometry": {"type": "LineString", "coordinates": [[120.0, 10.0], [120.1, 10.0], [120.2, 10.0], [120.3, 10.0]]},
"legs": [
{
"distance": 30.0,
"duration": 100.0,
"steps": []
},
{
"distance": 60.0,
"duration": 200.0,
"steps": []
}
]
}
RouteLeg object
Represents a route between two waypoints.
Properties
distance: The distance traveled by this route leg, infloatmeters.duration: The estimated travel time, infloatnumber of seconds.weight: The calculated weight of the route leg.summary: Summary of the route taken asstring. Depends on thesummaryparameter:
| summary | |
|---|---|
| true | Names of the two major roads used. Can be empty if route is too short. |
| false | empty
string |
steps: Depends on thestepsparameter.
| steps | |
|---|---|
| true | array of
RouteStep
objects describing the turn-by-turn instructions |
| false | empty array |
annotation: Additional details about each coordinate along the route geometry:
| annotations | |
|---|---|
| true | An
Annotation
object containing node ids, durations, distances and weights. |
| false | undefined |
With steps=false and annotations=true:
Example
{
"distance": 30.0,
"duration": 100.0,
"weight": 100.0,
"steps": [],
"annotation": {
"distance": [5,5,10,5,5],
"duration": [15,15,40,15,15],
"datasources": [1,0,0,0,1],
"metadata": { "datasource_names": ["traffic","lua profile","lua profile","lua profile","traffic"] },
"nodes": [49772551,49772552,49786799,49786800,49786801,49786802],
"speed": [0.3, 0.3, 0.3, 0.3, 0.3]
}
}
Annotation object
Annotation of the whole route leg with fine-grained information about each segment or node id.
Properties
distance: The distance, in metres, between each pair of coordinatesduration: The duration between each pair of coordinates, in seconds. Does not include the duration of any turns.datasources: The index of the datasource for the speed between each pair of coordinates.0is the default profile, other values are supplied via--segment-speed-filetoosrm-contractorosrm-customize. String-like names are in themetadata.datasource_namesarray.nodes: The OSM node ID for each coordinate along the route, excluding the first/last user-supplied coordinatesweight: The weights between each pair of coordinates. Does not include any turn costs.speed: Convenience field, calculation ofdistance / durationrounded to one decimal place-
metadata: Metadata related to other annotationsdatasource_names: The names of the datasources used for the speed between each pair of coordinates.lua profileis the default profile, other values arethe filenames supplied via--segment-speed-filetoosrm-contractorosrm-customize
Example
{
"distance": [5,5,10,5,5],
"duration": [15,15,40,15,15],
"datasources": [1,0,0,0,1],
"metadata": { "datasource_names": ["traffic","lua profile","lua profile","lua profile","traffic"] },
"nodes": [49772551,49772552,49786799,49786800,49786801,49786802],
"weight": [15,15,40,15,15]
}
RouteStep object
A step consists of a maneuver such as a turn or merge, followed by a distance of travel along a single way to the subsequent step.
Properties
distance: The distance of travel from the maneuver to the subsequent step, infloatmeters.duration: The estimated travel time, infloatnumber of seconds.geometry: The unsimplified geometry of the route segment, depending on thegeometriesparameter.weight: The calculated weight of the step.
geometry |
|
|---|---|
| polyline | polyline with precision 5 in [ latitude,longitude ] encoding |
| polyline6 | polyline with precision 6 in [ latitude,longitude ] encoding |
| geojson | GeoJSON LineString |
name: The name of the way along which travel proceeds.ref: A reference number or code for the way. Optionally included, if ref data is available for the given way.pronunciation: A string containing an IPA phonetic transcription indicating how to pronounce the name in thenameproperty. This property is omitted if pronunciation data is unavailable for the step.destinations: The destinations of the way. Will beundefinedif there are no destinations.exits: The exit numbers or names of the way. Will beundefinedif there are no exit numbers or names.mode: A string signifying the mode of transportation.maneuver: AStepManeuverobject representing the maneuver.intersections: A list ofIntersectionobjects that are passed along the segment, the very first belonging to the StepManeuverrotary_name: The name for the rotary. Optionally included, if the step is a rotary and a rotary name is available.rotary_pronunciation: The pronunciation hint of the rotary name. Optionally included, if the step is a rotary and a rotary pronunciation is available.driving_side: The legal driving side at the location for this step. Eitherleftorright.
Example
{
"geometry" : "{lu_IypwpAVrAvAdI",
"mode" : "driving",
"duration" : 15.6,
"weight" : 15.6,
"intersections" : [
{ "bearings" : [ 10, 92, 184, 270 ],
"lanes" : [
{ "indications" : [ "left", "straight" ],
"valid" : "false" },
{ "valid" : "true",
"indications" : [ "right" ] }
],
"out" : 2,
"in" : 3,
"entry" : [ "true", "true", "true", "false" ],
"location" : [ 13.39677, 52.54366 ]
},
{ "out" : 1,
"lanes" : [
{ "indications" : [ "straight" ],
"valid" : "true" },
{ "indications" : [ "right" ],
"valid" : "false" }
],
"bearings" : [ 60, 240, 330 ],
"in" : 0,
"entry" : [ "false", "true", "true" ],
"location" : [ 13.394718, 52.543096 ]
}
],
"name" : "Lortzingstraße",
"distance" : 152.3,
"maneuver" : {
"modifier" : "right",
"type" : "turn"
}
}
StepManeuver object
Properties
location: A[longitude, latitude]pair describing the location of the turn.bearing_before: The clockwise angle from true north to the direction of travel immediately before the maneuver. Range 0-359.bearing_after: The clockwise angle from true north to the direction of travel immediately after the maneuver. Range 0-359.typeA string indicating the type of maneuver. new identifiers might be introduced without API change Types unknown to the client should be handled like theturntype, the existence of correctmodifiervalues is guranteed.
type |
Description |
|---|---|
turn |
a basic turn into direction of the
modifier |
new name |
no turn is taken/possible, but the road name changes. The road can take a turn itself, following
modifier
. |
depart |
indicates the departure of the leg |
arrive |
indicates the destination of the leg |
merge |
merge onto a street (e.g. getting on the highway from a ramp, the
modifier specifies the direction of the merge
) |
ramp |
Deprecated
. Replaced by
on_ramp
and
off_ramp
. |
on ramp |
take a ramp to enter a highway (direction given my
modifier
) |
off ramp |
take a ramp to exit a highway (direction given my
modifier
) |
fork |
take the left/right side at a fork depending on
modifier |
end of road |
road ends in a T intersection turn in direction of
modifier |
use lane |
Deprecated replaced by lanes on all intersection entries |
continue |
Turn in direction of
modifier
to stay on the same road |
roundabout |
traverse roundabout, if the route leaves the roundabout there will be an additional property
exit
for exit counting. The modifier specifies the direction of entering the roundabout. |
rotary |
a traffic circle. While very similar to a larger version of a roundabout, it does not necessarily follow roundabout rules for right of way. It can offer
rotary_name
and/or
rotary_pronunciation
parameters (located in the RouteStep object) in addition to the
exit
parameter (located on the StepManeuver object). |
roundabout turn |
Describes a turn at a small roundabout that should be treated as normal turn. The
modifier
indicates the turn direciton. Example instruction:
At the roundabout turn left
. |
notification |
not an actual turn but a change in the driving conditions. For example the travel mode or classes. If the road takes a turn itself, the
modifier
describes the direction |
exit roundabout |
Describes a maneuver exiting a roundabout (usually preceeded by a
roundabout
instruction) |
exit rotary |
Describes the maneuver exiting a rotary (large named roundabout) |
Please note that even though there are new name and notification instructions, the mode and name can change
between all instructions. They only offer a fallback in case nothing else is to report.
modifierAn optionalstringindicating the direction change of the maneuver.
modifier |
Description |
|---|---|
uturn |
indicates reversal of direction |
sharp right |
a sharp right turn |
right |
a normal turn to the right |
slight right |
a slight turn to the right |
straight |
no relevant change in direction |
slight left |
a slight turn to the left |
left |
a normal turn to the left |
sharp left |
a sharp turn to the left |
The list of turns without a modifier is limited to: depart/arrive. If the source/target location is close enough to the depart/arrive location, no modifier will be given.
The meaning depends on the type property.
type |
Description |
|---|---|
turn |
modifier
indicates the change in direction accomplished through the turn |
depart
/
arrive |
modifier
indicates the position of departure point and arrival point in relation to the current direction of travel |
exitAn optionalintegerindicating number of the exit to take. The property exists for theroundabout/rotaryproperty: Number of the roundabout exit to take. If exit isundefinedthe destination is on the roundabout.
New properties (potentially depending on type) may be introduced in the future without an API version change.
Lane object
A Lane represents a turn lane at the corresponding turn location.
Properties
indications: a indication (e.g. marking on the road) specifying the turn lane. A road can have multiple indications (e.g. an arrow pointing straight and left). The indications are given in an array, each containing one of the following types. Further indications might be added on without an API version change.
value |
Description |
|---|---|
none |
No dedicated indication is shown. |
uturn |
An indication signaling the possibility to reverse (i.e. fully bend arrow). |
sharp right |
An indication indicating a sharp right turn (i.e. strongly bend arrow). |
right |
An indication indicating a right turn (i.e. bend arrow). |
slight right |
An indication indicating a slight right turn (i.e. slightly bend arrow). |
straight |
No dedicated indication is shown (i.e. straight arrow). |
slight left |
An indication indicating a slight left turn (i.e. slightly bend arrow). |
left |
An indication indicating a left turn (i.e. bend arrow). |
sharp left |
An indication indicating a sharp left turn (i.e. strongly bend arrow). |
valid: a boolean flag indicating whether the lane is a valid choice in the current maneuver
Example
{
"indications": ["left", "straight"],
"valid": "false"
}
Intersection object
An intersection gives a full representation of any cross-way the path passes bay. For every step, the very first intersection (intersections[0]) corresponds to the
location of the StepManeuver. Further intersections are listed for every cross-way until the next turn instruction.
Properties
location: A[longitude, latitude]pair describing the location of the turn.bearings: A list of bearing values (e.g. [0,90,180,270]) that are available at the intersection. The bearings describe all available roads at the intersection. Values are between 0-359 (0=true north)classes: An array of strings signifying the classes (as specified in the profile) of the road exiting the intersection.entry: A list of entry flags, corresponding in a 1:1 relationship to the bearings. A value oftrueindicates that the respective road could be entered on a valid route.falseindicates that the turn onto the respective road would violate a restriction.in: index into bearings/entry array. Used to calculate the bearing just before the turn. Namely, the clockwise angle from true north to the direction of travel immediately before the maneuver/passing the intersection. Bearings are given relative to the intersection. To get the bearing in the direction of driving, the bearing has to be rotated by a value of 180. The value is not supplied fordepartmaneuvers.out: index into the bearings/entry array. Used to extract the bearing just after the turn. Namely, The clockwise angle from true north to the direction of travel immediately after the maneuver/passing the intersection. The value is not supplied forarrivemaneuvers.lanes: Array ofLaneobjects that denote the available turn lanes at the intersection. If no lane information is available for an intersection, thelanesproperty will not be present.
Example
{
"location":[13.394718,52.543096],
"in":0,
"out":2,
"bearings":[60,150,240,330],
"entry":["false","true","true","true"],
"classes": ["toll", "restricted"],
"lanes":{
"indications": ["left", "straight"],
"valid": "false"
}
}
Waypoint object
Object used to describe waypoint on a route.
Properties
nameName of the street the coordinate snapped tolocationArray that contains the[longitude, latitude]pair of the snapped coordinatedistanceThe distance, in metres, from the input coordinate to the snapped coordinatehintUnique internal identifier of the segment (ephemeral, not constant over data updates) This can be used on subsequent request to significantly speed up the query and to connect multiple services. E.g. you can use thehintvalue obtained by thenearestquery ashintvalues forrouteinputs.
Example
{
"hint" : "KSoKADRYroqUBAEAEAAAABkAAAAGAAAAAAAAABhnCQCLtwAA_0vMAKlYIQM8TMwArVghAwEAAQH1a66g",
"distance" : 4.152629,
"name" : "Friedrichstraße",
"location" : [
13.388799,
52.517033
]
}
Flatbuffers format
Default response format is json, but OSRM supports binary flatbuffers format, which
is much faster in serialization/deserialization, comparing to json.
The format itself is described in message descriptors, located at include/engine/api/flatbuffers directory. Those descriptors could
be compiled to provide protocol parsers in Go/Javascript/Typescript/Java/Dart/C#/Python/Lobster/Lua/Rust/PHP/Kotlin. Precompiled
protocol parser for C++ is supplied with OSRM.
Flatbuffers format provides exactly same data, as json format with a slightly different layout, which was optimized to minimize
in-transfer size.
Root object
Root object is the only object, available from a 'raw' flatbuffers buffer. It can be constructed with a following call:
auto osrm = osrm::engine::api::fbresult::GetFBResult(some_input_buffer);
Properties
error:boolMarks response as erroneous. Erroneus response should includecodefield set, all the other field may not present.code:ErrorError description object, only present, whenerroristruewaypoints:[Waypoint]Array ofWaypointobjects. Should present for every service call, unlessskip_waypointsis set totrue. Table service will putsourcesarray here.routes:[RouteObject]Array ofRouteObjectobjects. May be empty or absent. Should present for Route/Trip/Match services call.table:TableTable object, may absent. Should be present in case of Table service call.
Error object
Contains error information.
Properties
code:stringError codemessage:stringDetailed error message
Waypoint object
Almost same as json Waypoint object. The following properties differ:
location:PositionSame asjsonlocation field, but different format.nodes:Uint64PairSame asjsonnodes field, but different format.
RouteObject object
Almost same as json Route object. The following properties differ:
polyline:stringSame asjsongeometry.polyline or geometry.polyline6 fields. One field for both formats.coordinates:[Position]Same asjsongeometry.coordinates field, but different format.legs:[Leg]Array ofLegobjects.
Leg object
Almost same as json Leg object. The following properties differ:
annotations:AnnotationSame asjsonannotation field, but different format.steps:[Step]Same asstepannotation field, but different format.
Step object
Almost same as json Step object. The following properties differ:
polyline:stringSame asjsongeometry.polyline or geometry.polyline6 fields. One field for both formats.coordinates:[Position]Same asjsongeometry.coordinates field, but different format.maneuver:StepManeuverSame asjsonmaneuver field, but different format.
type |
Description |
|---|---|
Turn |
a basic turn into direction of the
modifier |
NewName |
no turn is taken/possible, but the road name changes. The road can take a turn itself, following
modifier
. |
Depart |
indicates the departure of the leg |
Arrive |
indicates the destination of the leg |
Merge |
merge onto a street (e.g. getting on the highway from a ramp, the
modifier specifies the direction of the merge
) |
OnRamp |
take a ramp to enter a highway (direction given my
modifier
) |
OffRamp |
take a ramp to exit a highway (direction given my
modifier
) |
Fork |
take the left/right side at a fork depending on
modifier |
EndOfRoad |
road ends in a T intersection turn in direction of
modifier |
Continue |
Turn in direction of
modifier
to stay on the same road |
Roundabout |
traverse roundabout, if the route leaves the roundabout there will be an additional property
exit
for exit counting. The modifier specifies the direction of entering the roundabout. |
Rotary |
a traffic circle. While very similar to a larger version of a roundabout, it does not necessarily follow roundabout rules for right of way. It can offer
rotary_name
and/or
rotary_pronunciation
parameters (located in the RouteStep object) in addition to the
exit
parameter (located on the StepManeuver object). |
RoundaboutTurn |
Describes a turn at a small roundabout that should be treated as normal turn. The
modifier
indicates the turn direciton. Example instruction:
At the roundabout turn left
. |
Notification |
not an actual turn but a change in the driving conditions. For example the travel mode or classes. If the road takes a turn itself, the
modifier
describes the direction |
ExitRoundabout |
Describes a maneuver exiting a roundabout (usually preceeded by a
roundabout
instruction) |
ExitRotary |
Describes the maneuver exiting a rotary (large named roundabout) |
driving_side:boolTtrue stands for the left side driving.intersections:[Intersection]Same asjsonintersections field, but different format.
Intersection object
Almost same as json Intersection object. The following properties differ:
location:PositionSame asjsonlocation property, but in different format.lanes:[Lane]Array ofLaneobjects.
Lane object
Almost same as json Lane object. The following properties differ:
indications:TurnArray ofTurnenum values.
value |
Description |
|---|---|
None |
No dedicated indication is shown. |
UTurn |
An indication signaling the possibility to reverse (i.e. fully bend arrow). |
SharpRight |
An indication indicating a sharp right turn (i.e. strongly bend arrow). |
Right |
An indication indicating a right turn (i.e. bend arrow). |
SlightRight |
An indication indicating a slight right turn (i.e. slightly bend arrow). |
Straight |
No dedicated indication is shown (i.e. straight arrow). |
SlightLeft |
An indication indicating a slight left turn (i.e. slightly bend arrow). |
Left |
An indication indicating a left turn (i.e. bend arrow). |
SharpLeft |
An indication indicating a sharp left turn (i.e. strongly bend arrow). |
StepManeuver object
Almost same as json StepManeuver object. The following properties differ:
location:PositionSame asjsonlocation property, but in different format.type:ManeuverTypeType of a maneuver (enum)
type |
Description |
|---|---|
Turn |
a basic turn into direction of the
modifier |
NewName |
no turn is taken/possible, but the road name changes. The road can take a turn itself, following
modifier
. |
Depart |
indicates the departure of the leg |
Arrive |
indicates the destination of the leg |
Merge |
merge onto a street (e.g. getting on the highway from a ramp, the
modifier specifies the direction of the merge
) |
OnRamp |
take a ramp to enter a highway (direction given my
modifier
) |
OffRamp |
take a ramp to exit a highway (direction given my
modifier
) |
Fork |
take the left/right side at a fork depending on
modifier |
EndOfRoad |
road ends in a T intersection turn in direction of
modifier |
Continue |
Turn in direction of
modifier
to stay on the same road |
Roundabout |
traverse roundabout, if the route leaves the roundabout there will be an additional property
exit
for exit counting. The modifier specifies the direction of entering the roundabout. |
Rotary |
a traffic circle. While very similar to a larger version of a roundabout, it does not necessarily follow roundabout rules for right of way. It can offer
rotary_name
and/or
rotary_pronunciation
parameters (located in the RouteStep object) in addition to the
exit
parameter (located on the StepManeuver object). |
RoundaboutTurn |
Describes a turn at a small roundabout that should be treated as normal turn. The
modifier
indicates the turn direciton. Example instruction:
At the roundabout turn left
. |
Notification |
not an actual turn but a change in the driving conditions. For example the travel mode or classes. If the road takes a turn itself, the
modifier
describes the direction |
ExitRoundabout |
Describes a maneuver exiting a roundabout (usually preceeded by a
roundabout
instruction) |
ExitRotary |
Describes the maneuver exiting a rotary (large named roundabout) |
modifier:TurnManeuver turn (enum)
Annotation object
Exactly same as json annotation object.
Position object
A point on Earth.
Properties
longitute:floatPoint's longitudelatitude:floatPoint's latitude
Uint64Pair
A pair of long long integers. Used only by Waypoint object.
Properties
first:uint64First pair value.second:uint64Second pair value.
Table object
Almost same as json Table object. The main difference is that 'sources' field is absent and root's object 'waypoints' field is
used instead. All the other differences follow:
durations:[float]Flat representation of a durations matrix. Element at row;col can be adressed as [row * cols + col]distances:[float]Flat representation of a destinations matrix. Element at row;col can be adressed as [row * cols + col]destinations:[Waypoint]Array ofWaypointobjects. Will benullifskip_waypointswill be set totruerows:ushortNumber of rows in durations/destinations matrices.cols:ushortNumber of cols in durations/destinations matrices.
Introduction
OSRM can be used as a library (libosrm) via C++ instead of using it through the HTTP interface and osrm-routed. This allows for fine-tuning OSRM and has much less overhead. Here is a quick introduction into how to use libosrm in the upcoming v5 release.
Take a look at the example code that lives in the example directory. Here is all you ever wanted to know about libosrm, that is a short description of what the types do and where to find documentation on it:
Important interface objects
-
EngineConfig- for initializing an OSRM instance we can configure certain properties and constraints. E.g. the storage config is the base path such asfrance.osm.osrmfrom which we derive and loadfrance.osm.osrm.*auxiliary files. This also lets you set constraints such as the maximum number of locations allowed for specific services. -
OSRM- this is the main Routing Machine type with functions such asRouteandTable. You initialize it with aEngineConfig. It does all the heavy lifting for you. Each function takes its own parameters, e.g. theRoutefunction takesRouteParameters, and a out-reference to a JSON result that gets filled. The return value is aStatus, indicating error or success. -
Status- this is a type wrappingErrororOkfor indicating error or success, respectively. -
TableParameters- this is an example of parameter types the Routing Machine functions expect. In this caseTableexpects its own parameters asTableParameters. You can see it wrapping two vectors, sources and destinations --- these are indices into your coordinates for the table service to construct a matrix from (empty sources or destinations means: use all of them). If you ask yourself where coordinates come from, you can seeTableParametersinheriting fromBaseParameters. -
BaseParameter- this most importantly holds coordinates (and a few other optional properties that you don't need for basic usage); the specific parameter types inherit fromBaseParametersto get these member attributes. That means yourTableParameterstype hascoordinates,sourcesanddestinationmember attributes (and a few other that we ignore for now). -
Coordinate- this is a wrapper around a (longitude, latitude) pair. We really don't care about (lon,lat) vs (lat, lon) but we don't want you to accidentally mix them up, so both latitude and longitude are strictly typed wrappers around integers (fixed notation such as13423240) and floating points (floating notation such as13.42324). -
Parameters for other services - here are all other
*Parametersyou need for other Routing Machine services. -
JSON - this is a sum type resembling JSON. The Routing Machine service functions take a out-ref to a JSON result and fill it accordingly. It is currently implemented using mapbox/variant which is similar to Boost.Variant. There are two ways to work with this sum type: either provide a visitor that acts on each type on visitation or use the
getfunction in case you're sure about the structure. The JSON structure is written down in the HTTP API.
Example
See the example folder in the OSRM repository.
Workflow
- Create an
OSRMinstance initialized with aEngineConfig - Call the service function on the
OSRMobject providing service specific*Parameters - Check the return code and use the JSON result